
让客户满意是我们不断地追求
|
PID Measurement and Control (PIDMC)的由来 什么是PID
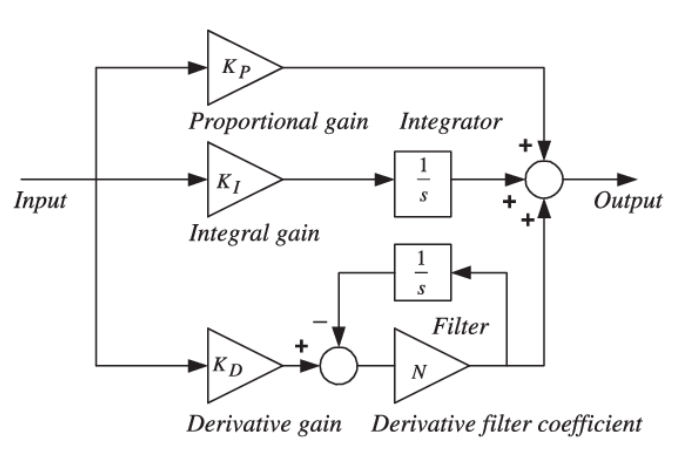
P(Proportional)比例环节: 着眼于当下误差,控制现在;
比例部分是基于当前误差(设定值与实际值的差值)进行调节。误差越大,控制器输出的调整量越大。 I(Integral)积分环节 :累计过去所有误差,纠正曾经;
积分部分是基于误差的累积(即误差随时间的积分)进行调节。它主要用于消除系统的稳态误差,使系统能够更接近设定值。 D(Derivative)微分环节:预测下一时刻误差,管控未来。
微分部分是基于误差的变化率(即误差的导数)进行调节。它主要用于预测误差的变化趋势,从而提前调整控制器输出,提高系统的动态响应性能。 PID控制器的输出公式不忘过往,把握当前,规划未来才能让人生的轨迹按照既定的目标前进!公司地址:
江苏省 苏州市 工业园区扬华路 8 号新扬产业园 B3 幢 4 楼 请添加右下方企业微信号联系我们申请样品试用 若您期望查询已购买的产品生产校准记录请输入SN序列号 |
|
您业务的可靠伙伴-Part of Your Business.
联系人:销售经理- 杨工(微信18662500723) |

Copyright © 2026 苏州派地测控技术有限公司 Suzhou PID Measurement and Control Technology Co., Ltd. 版权所有 苏ICP备2025153758号-1 |